Nta thiab ntaus ntawv ntawm electromagnetic ncua kev kawm ntawv
Txheem
Electromagnetic, qee zaum tsuas yog hu ua magnetic, ncua kev kawm nyob rau hauv lawv tus kheej, cais qhov chaw nyob rau hauv ib tug xov tooj ntawm ntau yam kev daws teeb meem rau tsheb chassis ntsiab. Qhov no yog ua tau los ntawm kev siv txoj kev ceev tshaj plaws los tswj cov yam ntxwv ntawm lub zog ntawm kev ncua - ncaj qha siv cov hlau nplaum. Qhov no tsis yog hydraulics, qhov twg cov kua siab tseem yuav tsum tau nce los ntawm lub twj tso kua mis thiab inert li qub, los yog pneumatics, qhov twg txhua yam yog txiav txim los ntawm kev txav ntawm huab cua huab cua. Qhov no yog ib qho tshuaj tiv thaiv tam sim ntawm qhov ceev ntawm lub teeb, qhov twg txhua yam yog txiav txim siab los ntawm kev ceev ntawm lub computer tswj thiab nws cov sensors. Thiab cov elastic thiab damping ntsiab yuav tshwm sim tam sim ntawd. Lub hauv paus ntsiab lus no muab cov pendants fundamentally tshiab zoo.

Dab tsi yog hlau nplaum ncua kev kawm ntawv
Cov no tsis yog ntab hauv qhov chaw, cov khoom tsis sib xws, tab sis qee yam zoo sib xws tau tshwm sim ntawm no. Lub rooj sib txoos ua haujlwm, ua haujlwm ntawm kev sib cuam tshuam ntawm cov hlau nplaum, zoo ib yam li cov qauv siv nrog lub caij nplooj ntoos hlav thiab lub caij nplooj ntoos hlav, tab sis qhov txawv ntawm nws txhua yam. Lub repulsion ntawm electromagnet ncej ntawm tib lub npe ua hauj lwm raws li ib tug elastic caij, thiab ceev tswj los ntawm kev hloov cov hluav taws xob tam sim no ntws los ntawm windings tso cai rau koj mus hloov lub zog ntawm no repulsion ntawm ib tug ceev ceev.
Pendants tsim los ntawm cov tuam txhab sib txawv yog tsim nyob rau hauv ntau txoj kev. Ib txhia ntawm lawv yog tag nrho-fledged, tab sis ua hauj lwm rau lwm cov hauv paus ntsiab lus, ua ke ntawm ib tug elastic keeb thiab ib tug damper, lwm tus neeg muaj peev xwm hloov tau tsuas yog cov yam ntxwv ntawm lub shock absorber, uas nyob rau hauv feem ntau yog txaus. Nws yog txhua yam hais txog kev ceev.
Cov kev xaiv tiav
Muaj peb qhov kev paub zoo thiab tsim tau zoo tiag tiag raws li kev sib cuam tshuam ntawm electromagnets hauv kev ncua struts. Lawv tau muab los ntawm Delphi, SKF thiab Bose.
Delphi qhov system
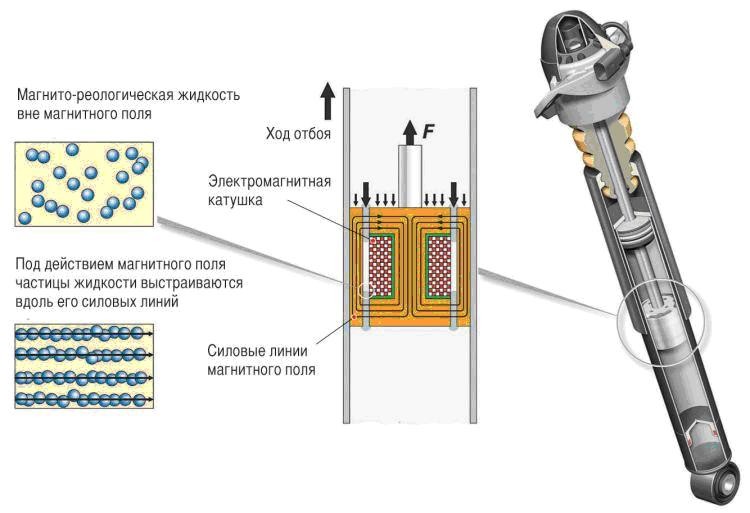
Qhov kev siv yooj yim tshaj plaws, ntawm no lub khib muaj cov pa coil caij nplooj ntoos hlav thiab hluav taws xob tswj kev poob siab absorber. Lub tuam txhab tau raug hu ua nws tawm raws li qhov tseem ceeb tshaj plaws ntawm kev tswj kev ncua. Static stiffness tsis yog ib qho tseem ceeb, nws muaj txiaj ntsig zoo dua los tswj cov khoom hauv cov dynamics.
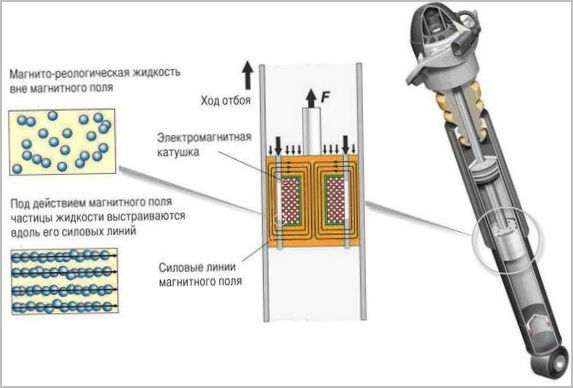
Ua li no, ib qho classical hom shock absorber yog ntim nrog ib tug tshwj xeeb ferromagnetic kua uas yuav polarized nyob rau hauv ib tug magnetic teb. Yog li, nws tau dhau los ua qhov hloov pauv viscosity yam ntxwv ntawm kev poob siab absorber roj ntawm kev kub ceev. Thaum dhau los ntawm cov dav hlau calibrated thiab li qub, nws yuav muab kev sib txawv rau lub piston thiab shock absorber pas nrig.
Lub khoos phis tawj ncua kev kawm sau cov teeb liab los ntawm ntau lub tsheb sensors thiab tswj cov tam sim no hauv electromagnet winding. Lub shock absorber teb rau txhua qhov kev hloov pauv hauv kev ua haujlwm, piv txwv li, nws tuaj yeem ua haujlwm sai thiab ua haujlwm tawm ntawm pob, ua kom lub tsheb tsis txhob dov, lossis tiv thaiv kev dhia dej thaum nres. Qhov nruj ntawm kev ncua tuaj yeem xaiv los ntawm koj tus kheej kev txiav txim siab los ntawm cov chaw ruaj khov rau kev sib txawv ntawm kev ua kis las lossis kev nplij siab.
Sib nqus caij nplooj ntoos hlav caij SKF
Ntawm no txoj hauv kev yog txawv kiag li, kev tswj yog raws li lub hauv paus ntsiab lus ntawm kev hloov elasticity. Lub caij nplooj ntoos hlav classical tseem ploj lawm; hloov pauv, SKF capsule muaj ob lub tshuab hluav taws xob uas tawm tsam ib leeg nyob ntawm lub zog ntawm tam sim no siv rau lawv cov windings. Txij li cov txheej txheem yog ceev heev, xws li ib tug system yuav ua hauj lwm raws li ib tug elastic keeb los yog raws li ib tug poob siab absorber, siv lub zog tsim nyog nyob rau hauv txoj cai coj mus dampen vibrations.

Muaj lub caij nplooj ntoos hlav ntxiv rau hauv lub khib, tab sis nws tsuas yog siv los ua kev pov hwm thaum muaj hluav taws xob tsis ua haujlwm. Qhov tsis zoo yog lub zog siab heev uas siv los ntawm electromagnets, uas yog tsim nyog los tsim ib lub zog ntawm qhov kev txiav txim uas feem ntau tshwm sim nyob rau hauv lub tsheb ncua kev kawm ntawv. Tab sis lawv tiv nrog qhov no, thiab qhov nce ntawm cov load ntawm on-board hluav taws xob network tau ntev dhau los ua ib qho kev sib txawv hauv kev lag luam tsheb.
Sib nqus suspension los ntawm Bose
Xibfwb Bose tau ua haujlwm ntawm cov hais lus nrov thoob plaws nws lub neej, yog li nws tau siv tib lub hauv paus ntsiab lus ntawm lub zog ncua kev kawm raws li qhov muaj - txav tus neeg nqa khoom tam sim no hauv thaj chaw sib nqus. Xws li ib tug ntaus ntawv, qhov twg ib tug multi-ncej hlau nplaum ntawm lub khib pas nrig txav nyob rau hauv ib tug txheej ntawm lub nplhaib electromagnets, feem ntau hu ua ib tug linear electric motor, vim hais tias nws yog kwv yees li qub, tsuas yog lub rotor thiab stator system yog deployed nyob rau hauv ib tug kab.
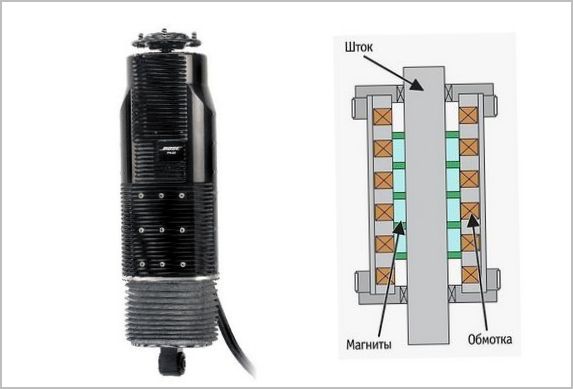
Multi-ncej lub cev muaj zog ntau dua li SKF ob-ncej system, yog li kev siv hluav taws xob tsawg dua. Muaj ntau lwm yam txiaj ntsig thiab. Qhov ceev yog xws li tias lub kaw lus tuaj yeem tshem tawm cov teeb liab ntawm lub sensor, thim rov qab nws theem, ua kom nrov nrov thiab yog li them nyiaj rau txoj kev tsis sib xws nrog kev ncua. Ib yam zoo sib xws tshwm sim hauv cov suab nrov nrov-tso tseg siv lub tsheb teeb tsa.
Lub kaw lus ua haujlwm tau zoo heev uas nws qhov kev sim thawj zaug pom tau tias muaj txiaj ntsig zoo tshaj plaws txawm tias tus qauv nqi tsheb ncua. Nyob rau tib lub sijhawm, qhov ntev ntawm linear electromagnets muab qhov tseem ceeb ncua kev mus ncig thiab kev siv lub zog zoo. Thiab ib qho ntxiv ntxiv tau dhau los ua qhov muaj peev xwm tsis ua kom lub zog nqus tau thaum lub sijhawm ua haujlwm damping, tab sis hloov nws siv qhov thim rov qab ntawm electromagnets thiab xa mus rau tus tsav siv tom qab siv.
Kev tswj kev ncua thiab kev ua tiav ntawm cov txiaj ntsig tau muab
Qhov muaj peev xwm ntawm cov hlau nplaum sib nqus hauv qhov raug tshem tawm tau qhia tag nrho nrog lub koom haum ntawm lub kaw lus ntawm cov sensors, lub khoos phis tawj siab ceev thiab cov qauv tsim software zoo. Cov txiaj ntsig tsuas yog amazing:
- du khiav tshaj txhua qhov kev cia siab;
- txoj kev ncua kev cuam tshuam nyob rau hauv cov ces kaum, highlighting loaded thiab pib nce log;
- parrying pecks thiab pickups ntawm lub cev;
- ua kom tiav damping ntawm yob;
- emancipation ntawm pendants ntawm nyuaj struts;
- daws qhov teeb meem ntawm unsprung pawg;
- kev koom tes nrog cov koob yees duab thiab radars scan txoj kev nyob rau hauv pem hauv ntej ntawm lub tsheb rau pre-emptive ua;
- muaj peev xwm ua hauj lwm tawm cov kab kos navigation, qhov twg qhov chaw nyem tau sau ua ntej.
Tsis muaj dab tsi zoo dua li cov hlau nplaum pendants tseem tau tsim. Cov txheej txheem ntawm kev txhim kho ntxiv thiab kev tsim cov algorithms txuas ntxiv mus, kev txhim kho tseem tab tom mus txawm nyob rau hauv cov tsheb ntawm cov chav kawm siab tshaj plaws, qhov twg tus nqi ntawm cov khoom siv no yog qhov ncaj ncees. Nws tseem tsis tau mus txog lub ntsiab lus ntawm kev siv ntawm cov khoom tsim los ntawm cov chassis, tab sis nws twb paub meej tias yav tom ntej yog rau cov tshuab no.