Lub hom phiaj thiab hom tsheb log sib dhos lub kaum sab xis
Txheem
Txhawm rau kom ua haujlwm tau zoo thiab nyab xeeb, cov chaw tsim khoom tau suav cov kaum sab xis ntawm lub log rau txhua lub tsheb.
Lub geometry ntawm lub ncua kev kawm ntawv thiab lub log yog teev thiab xyuas thaum lub sij hawm kev sim dej hiav txwv.
Assignment ntawm lub log sib dhos lub kaum sab xis
Lub spatial txoj hauj lwm ntawm lub log teev los ntawm cov chaw tsim tshuaj paus muab:
- Cov lus teb txaus ntawm lub log thiab kev ncua rau lub zog thiab kev thauj khoom uas tshwm sim hauv txhua hom kev tsav tsheb.
- Zoo thiab kwv yees controllability ntawm lub tshuab, kev nyab xeeb kev ua tau zoo ntawm complex thiab high-ceev maneuvers.
- Tsawg khiav tsis kam, txawm tread hnav.
- High roj efficiency, txo nqi khiav hauj lwm.
Hom yooj yim installation kaum
| Khoom npe | tsheb qag | Muaj peev xwm hloov kho | Dab tsi nyob ntawm qhov parameter |
| Lub camber | Hauv ntej | Yog, tshwj tsis yog rau kev tsav tsheb tsis tu ncua thiab kev ncua ntev. | Cornering stability thiab txawm tread hnav |
| Tom qab | Yog, nyob rau hauv multi-link devices. | ||
| ntiv taw kaum | Hauv ntej | Yog, nyob rau hauv tag nrho cov tsim. | Qhov ncaj ntawm lub trajectory, uniformity ntawm lub log tsheb. |
| Tom qab | Adjustable nkaus xwb nyob rau hauv multi-link thrusters | ||
| Lateral lub kaum sab xis ntawm inclination ntawm lub axis ntawm kev sib hloov | Hauv ntej | Tsis muaj kev hloov kho. | Lateral stability nyob rau hauv lem. |
| Longitudinal lub kaum sab xis ntawm inclination ntawm lub axis ntawm kev sib hloov | Hauv ntej | Nyob ntawm tus qauv tsim. | Yooj yim rau kaum tawm, tswj kev ncaj |
| Tuav lub xub pwg nyom | Hauv ntej | Tsis tswj. | Tswj kev taw qhia thaum lub sijhawm mus ncig thiab nres. |
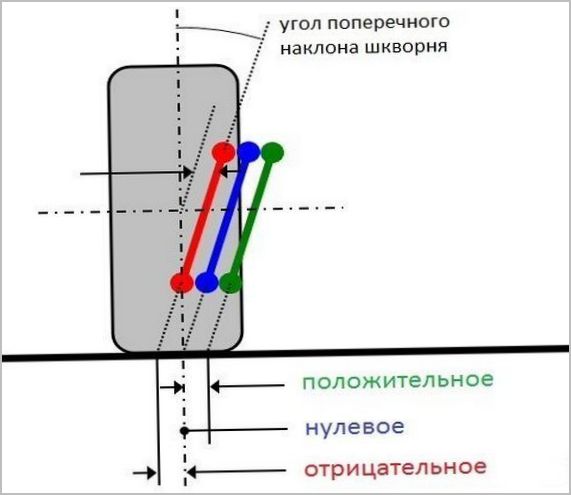
Sua
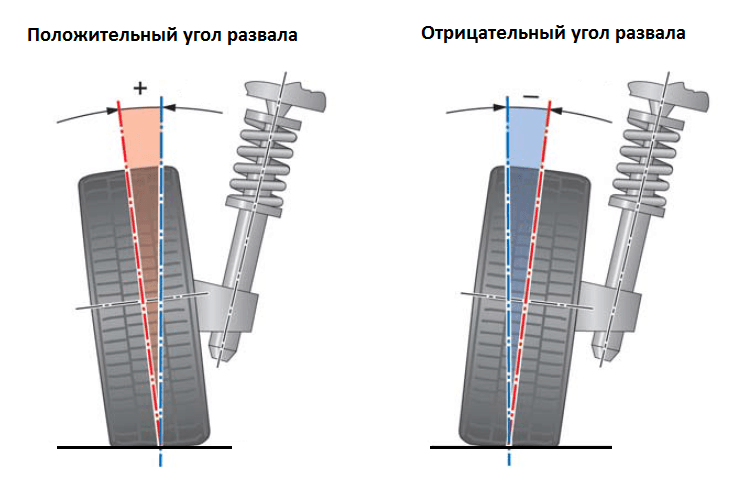
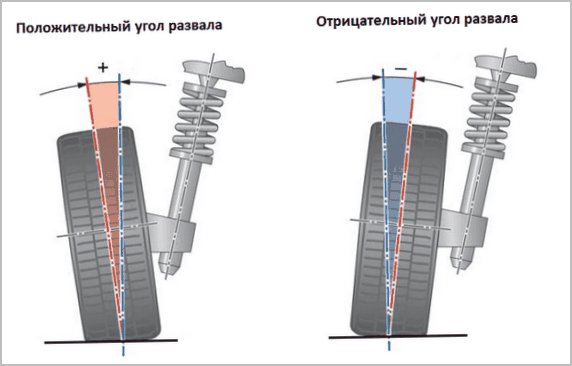
Lub kaum sab xis ntawm lub dav hlau nruab nrab ntawm lub log thiab lub dav hlau ntsug. Nws tuaj yeem yog nruab nrab, zoo thiab tsis zoo.
- Zoo camber - lub dav hlau nruab nrab ntawm lub log deviates sab nraud.
- Tsis zoo - lub log yog qaij rau ntawm lub cev.
Lub camber yuav tsum yog symmetrical, lub kaum sab xis ntawm lub log ntawm ib lub qag yuav tsum zoo ib yam, txwv tsis pub lub tsheb yuav rub mus rau cov kev taw qhia ntawm ntau dua camber.
Nws yog tsim los ntawm txoj hauj lwm ntawm lub semi-axle trunnion thiab lub hub, nyob rau hauv ywj siab lever suspensions nws yog tswj los ntawm txoj hauj lwm ntawm lub transverse levers. Nyob rau hauv MacPherson-hom qauv, camber yog txiav txim los ntawm kev sib nrig sib txoj hauj lwm ntawm sab caj npab thiab shock absorber strut.
Nyob rau hauv cov kev siv pivot-hom ncua kev kawm ntawv thiab nyob rau hauv cov khoom axles ntawm classic SUVs, camber tsis kho thiab yog teem los ntawm tus tsim ntawm lub kauj knuckles.
Nruab nrab (zero) camber nyob rau hauv lub chassis ntawm cov neeg nrog caij tsheb yog xyaum tsis pom.
Qhov tsis zoo ntawm camber ncua kev kawm ntawv muaj nyob rau hauv kev tsim kho ntawm cov kev ua si thiab kev sib tw tsheb, uas stability nyob rau hauv high-ceev lem yog ib qho tseem ceeb.
Deviations ntawm qhov zoo camber kaum los ntawm tus nqi muab los ntawm cov chaw tsim tshuaj paus nyob rau hauv txhua rooj plaub entails tsis zoo txim:
- Kev nce hauv camber ua rau lub tsheb tsis ruaj khov ntawm kev khoov, ua rau muaj kev sib txhuam ntawm cov log tsheb ntawm txoj kev thiab ceev ceev ntawm cov treads sab nraud.
- Txo lub cev qhuav dej ua rau lub tsheb tsis ruaj khov, yuam tus neeg tsav tsheb mus tas li. Txo dov tsis kam, tab sis ua rau muaj kev hnav ntau dua ntawm cov log tsheb sab hauv.
Kev Sib Koom Siab
Lub kaum sab xis ntawm lub longitudinal axis ntawm lub tshuab thiab lub dav hlau ntawm kev sib hloov ntawm lub log.
Lub dav hlau ntawm kev sib hloov ntawm lub log converge ntawm ib leeg thiab sib tshuam nyob rau hauv pem hauv ntej ntawm lub tsheb - lub convergence yog zoo.
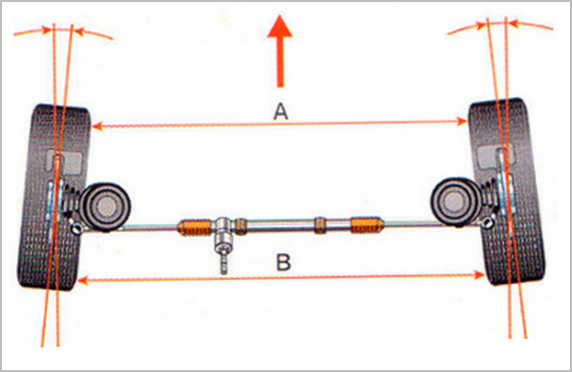
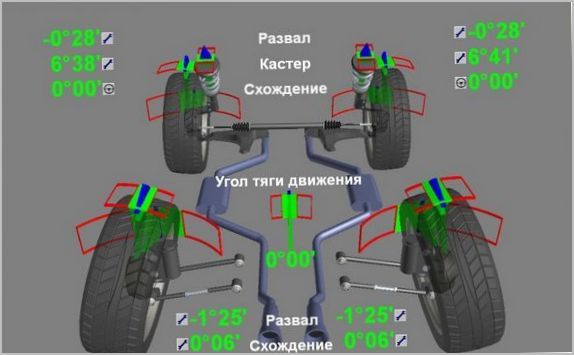
Hauv cov ntaub ntawv ua haujlwm, tus nqi sib txuam tuaj yeem qhia tau nyob rau hauv angular degrees lossis hauv millimeters. Nyob rau hauv cov ntaub ntawv no, ntiv taw-hauv yog txhais raws li qhov sib txawv ntawm qhov kev ncua deb ntawm lub disc rims ntawm lub siab pem hauv ntej thiab nram qab cov ntsiab lus ntawm qhov siab ntawm lub axis ntawm kev sib hloov, thiab yog xam raws li qhov nruab nrab tus nqi raws li qhov tshwm sim ntawm ob los yog peb. ntsuas thaum lub tshuab dov rau ntawm qhov chaw tiaj tus. Ua ntej ua kev ntsuas, nws yog ib qho tsim nyog yuav tsum xyuas kom meej tias tsis muaj lateral runout ntawm cov discs.
Nyob rau hauv khoov, lub log pem hauv ntej txav raws curves ntawm txawv radii, yog li nws yog ib qho tseem ceeb heev uas lawv tus kheej convergences yog sib npaug zos thiab cov sum tsis tshaj cov nqi thiab tolerances teem los ntawm cov chaw tsim tshuaj paus.
Txawm hais tias hom kev ncua, lub kauj tsheb ntawm cov neeg caij tsheb muaj qhov zoo ntiv taw-hauv thiab yog symmetrically tig mus rau sab hauv nrog kev hwm rau "mus tom ntej" kev taw qhia.
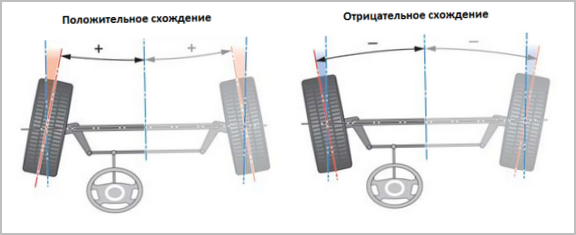
Tsis pom zoo ntiv taw-hauv ntawm ib lossis ob lub log tsis raug tso cai.
Deviations ntawm convergence los ntawm lub teeb nqi ua rau nws nyuaj rau tswj lub tsheb thiab khaws cia nyob rau hauv lub trajectory thaum lub sij hawm high-ceev maneuvers. Tsis tas li ntawd:
- Txo cov ntiv taw-hauv txo cov dov tsis kam, tab sis ua rau traction phem.
- Kev sib xyaw ua ke ntau ntxiv ua rau muaj kev sib txhuam ntawm sab nraud thiab ua kom tsis sib xws ntawm cov tread.
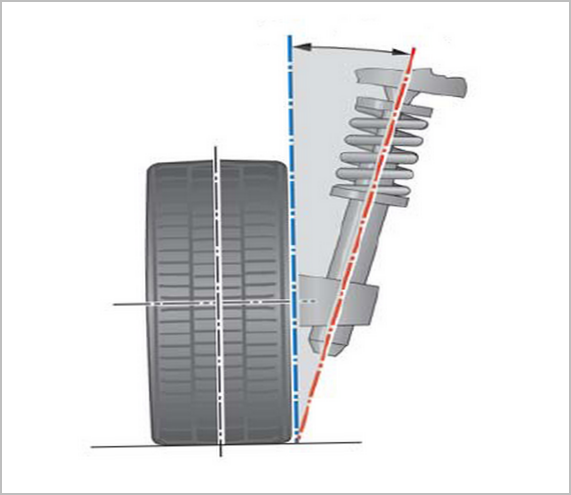
Lateral lub kaum sab xis ntawm inclination ntawm lub axis ntawm kev sib hloov
Lub kaum sab xis ntawm lub dav hlau ntsug thiab lub axis ntawm kev sib hloov ntawm lub log.
Lub axis ntawm kev sib hloov ntawm lub kauj tsheb yuav tsum tau coj mus rau hauv lub tshuab. Thaum tig, lub log sab nraud zoo li tsa lub cev, thaum lub log sab hauv qis dua nws. Yog li ntawd, lub zog yog tsim nyob rau hauv lub ncua kev kawm ntawv uas tiv thaiv lub cev yob thiab pab txhawb kev xa rov qab ntawm lub ncua kev kawm ntawv units mus rau qhov nruab nrab txoj hauj lwm.
Lub transverse inclination ntawm steering axes yog kho los ntawm fastening lub steering knuckle mus rau lub ncua kev kawm ntawv cov ntsiab lus thiab tsuas tuaj yeem hloov tom qab muaj kev cuam tshuam loj heev, piv txwv li, thaum skidding nrog ib qho kev cuam tshuam ntawm kev curb.
Qhov sib txawv ntawm lub kaum sab xis ntawm txoj kab kev sib hloov ntawm lub axles ua rau lub tsheb tsis tu ncua ntawm txoj kev ncaj, yuam tus neeg tsav tsheb mus tas li thiab siv zog tsav.
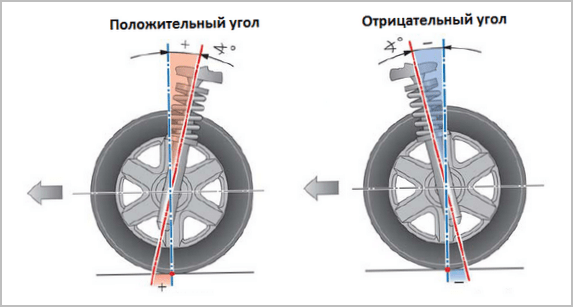
Caster lub kaum sab xis ntawm kev sib hloov axis
Nws yog nyob rau hauv lub dav hlau longitudinal thiab yog tsim los ntawm ib txoj kab ncaj nraim thiab ib txoj kab ncaj nraim los ntawm cov chaw ntawm kev sib hloov ntawm lub log.
Txoj kab ntawm kev xa cov chaw nyob hauv ib qho txuas txuas hla dhau los ntawm lub pob bearings ntawm lub levers, hauv MacPherson hom qauv los ntawm cov ntsiab lus txuas rau sab sauv thiab sab qis ntawm qhov poob siab absorber strut, nyob rau hauv ib txoj kab ncaj nraim los yog txuas txuas ntxiv - raws cov axes ntawm cov pivots.
Qee zaum qhov ntsuas no hu ua "castor".
Kev siv. Nyob rau hauv lub interface ntawm lub computer log alignment test stand, nws yog sau nyob rau hauv Lavxias teb sab "castor".
Tus nqi parameter tuaj yeem yog:
- Qhov zoo, lub axis ntawm kev sib hloov ntawm lub log yog qhia txheeb ze rau ntsug "rov qab".
- Tsis zoo, lub axis ntawm kev sib hloov yog qhia "rau pem hauv ntej".
Nyob rau hauv cov neeg nrog caij tsheb tsim nyob rau hauv lub USSR thiab Russia thiab txawv teb chaws tsheb muag nyob rau hauv Lavxias teb sab Federation, castor tsis muaj ib tug tsis zoo nqi.
Nrog cov kaum sab xis zoo, lub ntsiab lus ntawm lub log sib cuag nrog hauv av yog qab lub kauj axis. Lateral rog tshwm sim hauv kev txav thaum lub log tig zoo li rov qab mus rau nws txoj haujlwm qub.
Ib tug zoo castor muaj qhov zoo ntawm camber nyob rau hauv cov ces kaum thiab muab qib thiab stabilizing rog. Qhov loj dua tus nqi castor, qhov ntau dua cov teebmeem no.
Qhov tsis zoo ntawm kev ncua nrog cov castor zoo suav nrog kev siv zog loj uas yuav tsum tau tig lub kauj ntawm lub tsheb nyob ruaj khov.
Yog vim li cas rau qhov kev hloov pauv hauv castor tej zaum yuav yog lub taub hau ntawm kev sib tsoo ntawm lub log nrog ib qho kev cuam tshuam, lub tsheb poob rau hauv lub qhov dej los yog lub pas dej ntawm ib sab, qhov txo qis hauv av clearance raws li qhov tshwm sim ntawm kev puas tsuaj ntawm cov khoom hnav.
Khiav-hauv xub pwg
Qhov kev ncua deb ntawm lub dav hlau ntawm kev sib hloov ntawm lub kauj thiab nws axis ntawm kev sib hloov, ntsuas ntawm qhov chaw txhawb nqa.
Ncaj nraim cuam tshuam kev tuav thiab kev ruaj ntseg hauv kev txav.
Dov lub xub pwg - lub vojvoog uas lub log "rolls" nyob ib ncig ntawm lub axis ntawm kev sib hloov. Nws tuaj yeem yog xoom, zoo (qhia "tawm") thiab tsis zoo (qhia "hauv").
Lever thiab dependent suspensions yog tsim los nrog lub xub pwg dov zoo. Qhov no tso cai rau koj tso ib tug nres mechanism, hinges ntawm levers thiab steering rods nyob rau hauv lub log disk.
Qhov zoo ntawm cov qauv tsim nrog lub xub pwg nyom zoo:
- Lub log yog nqa tawm, tso tawm qhov chaw nyob rau hauv lub cav compartment;
- Txo cov kauj ruam thaum nres tsheb thaum lub log yob ib ncig ntawm lub kauj axis es tsis txhob tig rau hauv qhov chaw.
Qhov tsis zoo ntawm cov qauv tsim nrog lub xub pwg dov zoo: thaum ib qho ntawm lub log tsoo ib qho kev cuam tshuam, lub brakes ntawm ib sab tsis ua haujlwm lossis lub log tawg, lub kauj log yog rub tawm ntawm tus neeg tsav tsheb txhais tes, cov ntsiab lus ntawm lub kauj trapezium puas, thiab ntawm kev kub ceev lub tsheb mus rau hauv ib tug skid.
Txhawm rau txo qhov tshwm sim ntawm qhov xwm txheej txaus ntshai, kev tsim kho ntawm MacPherson hom, nrog xoom lossis tsis zoo dov lub xub pwg, tso cai.
Thaum xaiv cov disks tsis yog lub Hoobkas, nws yog qhov yuav tsum tau coj mus rau hauv tus account qhov tsis pom zoo los ntawm cov chaw tsim khoom, ua ntej ntawm tag nrho cov, offset. Txhim kho cov discs dav nrog nce mus txog yuav hloov lub xub pwg rollover, uas yuav cuam tshuam rau kev tuav thiab kev nyab xeeb ntawm lub tshuab.
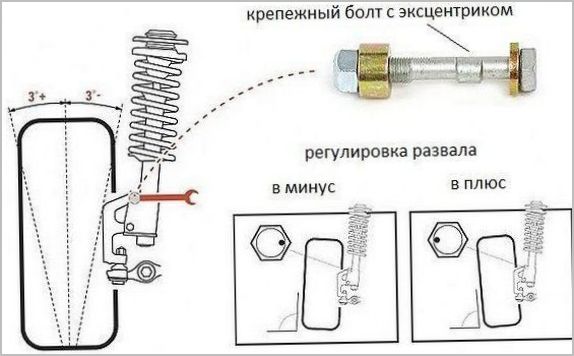
Hloov cov kaum sab xis installation thiab kho lawv
Txoj hauj lwm ntawm lub log ntawm lub cev hloov pauv raws li cov khoom raug tshem tawm, thiab yuav tsum tau rov qab los tom qab hloov cov pob qij txha, cov blocks uas ntsiag to, cov pas tuav, cov hlua thiab cov hlua.
Nws raug nquahu kom muab cov kev kuaj mob thiab kev hloov kho ntawm lub chassis geometry nrog kev saib xyuas tsis tu ncua, tsis tas tos rau qhov ua tsis tau zoo kom "crawl out" lawv tus kheej.
Lub convergence yog teem los ntawm kev hloov qhov ntev ntawm lub steering rods. Camber - los ntawm kev ntxiv thiab tshem tawm shims, rotating eccentrics los yog "breakup" bolts.
Kev hloov pauv castor muaj nyob rau hauv cov qauv tsis tshua muaj thiab nqis los tshem tawm lossis txhim kho shims ntawm ntau qhov tuab.
Txhawm rau kho qhov tsis sib xws uas tau teeb tsa hauv kev teeb tsa thiab, tejzaum nws, hloov pauv raws li qhov tshwm sim ntawm kev sib tsoo lossis kev sib tsoo, nws yuav tsum tau muab tshem tawm tag nrho nrog kev ntsuas thiab teeb meem ntawm txhua chav tsev thiab ib feem thiab xyuas cov ntsiab lus tseem ceeb ntawm cov khoom siv. lub cev tsheb.