Qhov system ntawm kev sib pauv tus nqi stability - nws yog dab tsi nyob rau hauv ib lub tsheb
Txij li xyoo 2010, hauv Ixayees, Amelikas thiab EU, nws tau dhau los ua qhov yuav tsum tau muab cov tsheb muag nrog kev tswj hwm kev ruaj ntseg. Nws yog hu ua ib qho ntawm cov kev pabcuam kev nyab xeeb, vim nws pab tiv thaiv kev sib tsoo vim qhov tseeb tias cov khoos phis tawj tswj xyuas lub sijhawm ntawm kev sib hloov ntawm lub log.
Txhua tus neeg tsav tsheb los ntawm lub sijhawm kawm ntawm lub tsev kawm tsav tsheb paub tias nws yuav luag tsis yooj yim kom haum rau kev tig ntawm kev kub ceev. Yog hais tias koj txiav txim siab rau xws li ib tug maneuver, ces lub tsheb yuav twv yuav raug hu skid, nrog rau tag nrho cov tshwm sim: tsav tsheb mus rau hauv txoj kev yuav los, rollover, tsav tsheb mus rau hauv ib tug kwj dej, kev sib tsoo nrog obstacles nyob rau hauv daim ntawv ntawm txoj kev qhia, lwm yam tsheb los yog laj kab.
Qhov phom sij tseem ceeb uas tos tus tsav tsheb ntawm txhua qhov tig yog lub zog centrifugal. Nws yog qhia nyob rau hauv opposite kev taw qhia los ntawm tig. Ntawd yog, yog tias koj xav tig sab xis ntawm qhov nrawm, tom qab ntawd nrog rau qib siab ntawm qhov tshwm sim nws tuaj yeem sib cav tias lub tsheb yuav hloov mus rau sab laug ntawm txoj kev npaj. Yog li, tus tswv tsheb tshiab yuav tsum kawm coj mus rau hauv tus account qhov ntev ntawm nws lub tsheb thiab xaiv qhov zoo tshaj plaws tig trajectory.
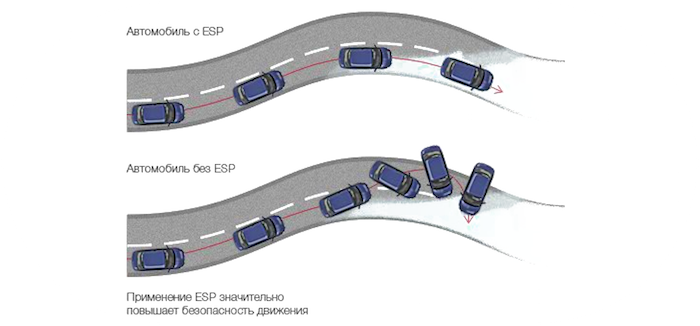
Lub kaw lus ntawm kev sib pauv tus nqi ruaj ntseg tsuas yog tsim los txhawm rau tswj kev txav ntawm lub tshuab hauv cov xwm txheej txaus ntshai. Ua tsaug rau nws, lub tsheb yog kom meej meej nyob rau hauv lub feem ntau haum trajectory rau cov xwm txheej muab.
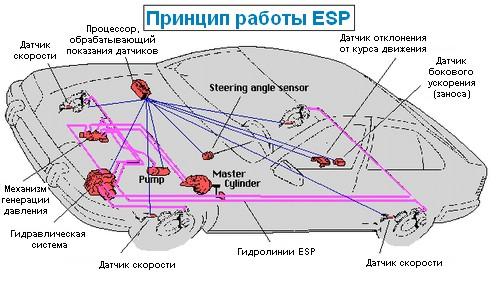
Cov cuab yeej thiab lub hauv paus ntsiab lus ntawm kev ua haujlwm ntawm kev sib pauv tus nqi stability system
Qhov system no, uas tseem hu ua dynamic stabilization system, yog qhov kev nyab xeeb zoo tshaj plaws niaj hnub no. Yog tias txhua lub tsheb tsis muaj kev zam tau nruab nrog nws, ces qhov kev sib tsoo ntawm txoj kev tuaj yeem raug txo los ntawm ib feem peb.
Thawj qhov kev txhim kho tau tshwm sim nyob rau xyoo 1980s, thiab txij li xyoo 1995, ESP (Electronic Stability Program) tau teeb tsa rau ntau lub tsheb hauv Tebchaws Europe thiab Asmeskas.
ESP muaj xws li:
- input sensors;
- chav tsev tswj;
- actuating ntaus ntawv - hydraulic unit.
Input sensors tswj ntau yam tsis: lub kaum sab xis, nres siab, ntev thiab sab nrawm nrawm, tsheb nrawm, lub log nrawm.
Chav tswj xyuas ntsuas tag nrho cov kev ntsuas no. Lub software muaj peev xwm txiav txim siab nyob rau hauv lus 20 milliseconds (1 millisecond yog ib txhiab ntawm ib tug thib ob). Thiab yog tias muaj qhov xwm txheej txaus ntshai tshwm sim, qhov thaiv xa cov lus txib mus rau tus actuator, uas muaj peev xwm ntawm:
- qeeb ib los yog tag nrho cov log los ntawm kev ua kom lub siab nyob rau hauv lub nres system;
- hloov lub cav ntswj;
- cuam tshuam lub kaum sab xis ntawm lub log;
- hloov cov degree ntawm damping ntawm shock absorbers.
Ntxiv rau tag nrho cov saum toj no, ESP muaj peev xwm cuam tshuam nrog lwm cov kev ruaj ntseg ruaj ntseg:
- anti-lock brakes;
- sib txawv xauv;
- kev faib ntawm braking rog;
- anti-slip.
Feem ntau cov xwm txheej nyob rau hauv qhov kev sib pauv tus nqi stabilization system los ua haujlwm. Yog tias lub kaw lus ceeb toom tias qhov kev txav txav tsis sib txawv ntawm cov lej suav, qhov kev txiav txim siab yog ua raws li qhov xwm txheej. Piv txwv li, tus neeg tsav tsheb, haum rau txoj kev tig, tsis tig lub kauj tsheb kom txaus nyob rau hauv txoj cai, tsis qeeb los yog tsis hloov mus rau qhov xav tau iav. Nyob rau hauv cov ntaub ntawv no, lub rear log yuav braked thiab ib txhij hloov nyob rau hauv torque yuav tshwm sim.

Yog tias tus neeg tsav tsheb, ntawm qhov tsis sib xws, tig lub kauj tsheb ntau dhau, lub log pem hauv ntej nyob rau sab nraud yuav qeeb (thaum tig sab xis - sab laug sab laug) thiab ib txhij nce lub zog ntawm lub sijhawm - vim qhov nce ntawm lub zog. , nws yuav ua tau kom ruaj khov lub tsheb thiab txuag nws ntawm skidding.
Nws yog ib qho tsim nyog sau cia tias cov neeg tsav tsheb muaj kev paub dhau los qee zaum tua ESP thaum nws tiv thaiv lawv los ntawm kev qhia tag nrho lawv cov kev txawj ntse, piv txwv li, lawv xav tsav tsheb raws txoj kev snowy nrog skids thiab slips. Kev lag luam, raws li lawv hais, tus tswv. Tsis tas li ntawd, thaum tawm ntawm txoj kev hla ntawm txoj kev daus, koj yuav tsum tig lub kauj tsheb mus rau qhov kev taw qhia ntawm txoj hlua khi, tom qab ntawd maj mam tig mus rau qhov sib txawv thiab nqis rau cov roj. Cov khoom siv hluav taws xob yuav tsis cia koj ua qhov ntawd. Hmoov zoo, ESP tuaj yeem raug kaw rau cov tsav tsheb nrawm no.

Peb yuav tsis pom zoo ua qhov no, txij li qhov kev tswj hwm kev ruaj ntseg feem ntau yeej cawm tus neeg tsav tsheb los ntawm qhov xwm txheej ceev.
Video hais txog lub tsheb ruaj ntseg tswj tshuab VSC thiab EPS.

Loading…

