Dab tsi yog thiab yuav ua li cas adaptive ncua kev kawm ntawv ua haujlwm
Txheem
Ib txoj hauv kev los txhim kho lub tsheb ncua kev kawm yog hloov mus rau qhov xwm txheej ntawm txoj kev, nrawm, lossis kev tsav tsheb. Nws yog qhov ua tau los ua qhov no nrog kev siv cov khoom siv hluav taws xob thiab kev kub ceev electromagnetic, pneumatic thiab hydraulic actuators. Tib lub tsheb, nrog rau kev hloov pauv ceev hauv cov yam ntxwv ncua kev kawm, tuaj yeem tau txais tus kheej lub peev xwm ntawm kev ua si tsheb, SUV lossis lub tsheb loj. Los yog tsuas yog txhim kho cov neeg caij tsheb yooj yim.
Lub hauv paus ntawm kev txhim kho kev hloov pauv
Txhawm rau kom tau txais lub peev xwm hloov mus rau lwm qhov cuam tshuam lossis cov lus txib tsav tsheb, qhov kev ncua yuav tsum tau txais tus cwj pwm nquag. Passive mechanisms ib txwm unequivocally react rau tej yam influences. Cov nquag muaj peev xwm hloov tau lawv tus yam ntxwv. Ua li no, lawv muaj lub tshuab hluav taws xob tswj hluav taws xob, uas yog lub khoos phis tawj uas sau cov ntaub ntawv los ntawm cov sensors thiab lwm lub tsheb, tau txais cov lus qhia los ntawm tus neeg tsav tsheb thiab, tom qab ua tiav, teeb tsa hom rau cov actuators.

Raws li koj paub, lub ncua kev kawm ntawv muaj xws li elastic ntsiab, damping li thiab ib tug qhia vane. Raws li txoj cai, nws muaj peev xwm tswj tau tag nrho cov khoom no, tab sis hauv kev xyaum nws yog qhov txaus los hloov cov khoom ntawm cov dampers (shock absorbers). Qhov no yog ib qho yooj yim ua nrog kev ua tau zoo. Txawm hais tias tsis tas yuav tsum muaj cov tshuaj tiv thaiv ceev, piv txwv li, hom chaw nres tsheb, kev hloov hauv av clearance los yog static stiffness yuav raug hloov, ces nws yog heev ua tau kom hloov lub ncua kev kawm ntawv configuration rau tag nrho nws cov Cheebtsam.
Rau kev ua haujlwm adaptation, nws yuav tsum tau coj mus rau hauv tus account ntau qhov kev nkag tsis tau:
- cov ntaub ntawv ntawm txoj kev irregularities, ob qho tib si tam sim no thiab yav tom ntej;
- txav ceev;
- kev taw qhia, uas yog, lub kaum sab xis ntawm kev sib hloov ntawm lub kauj tsheb thiab lub angular acceleration ntawm lub tsheb tag nrho;
- txoj hauj lwm thiab ceev ntawm kev sib hloov ntawm lub kauj;
- tus neeg tsav tsheb cov cai raws li kev txheeb xyuas ntawm nws txoj kev tsav tsheb, nrog rau cov uas nkag mus rau hauv phau ntawv hom;
- txoj hauj lwm ntawm lub cev txheeb ze rau txoj kev, tsis muaj kev hloov ntawm lub sij hawm;
- radar-hom sensor teeb liab uas txheeb xyuas qhov xwm txheej ntawm qhov kev pab cuam nyob rau hauv pem hauv ntej ntawm lub tsheb;
- longitudinal thiab transverse accelerations ntawm lub tsheb, cav thiab braking system kev khiav hauj lwm hom.
Qhov kev tswj hwm thaiv qhov kev pab cuam muaj cov algorithms los teb rau tag nrho cov khoom xa tuaj thiab rau cov ntaub ntawv khaws tseg. Cov lus txib feem ntau raug xa mus rau cov hluav taws xob tswj kev poob siab ntawm txhua lub log, ib tus zuj zus rau txhua tus, nrog rau cov kev sib txuas ua haujlwm ntawm cov khoom tiv thaiv yob. Los yog rau cov khoom siv uas hloov lawv thaum ua hauj lwm raws li ib feem ntawm tag nrho hydraulically tswj ncua kev kawm ntawv, raws li zoo raws li cov feem ntau high-tech khoom uas ua hauj lwm tshwj xeeb ntawm electromagnetic cuam tshuam. Hauv qhov kawg, qhov ceev ntawm cov lus teb yog siab heev uas yuav luag zoo tagnrho tus cwj pwm tuaj yeem ua tiav los ntawm kev ua haujlwm ntawm kev ncua.
Qhov System Composition
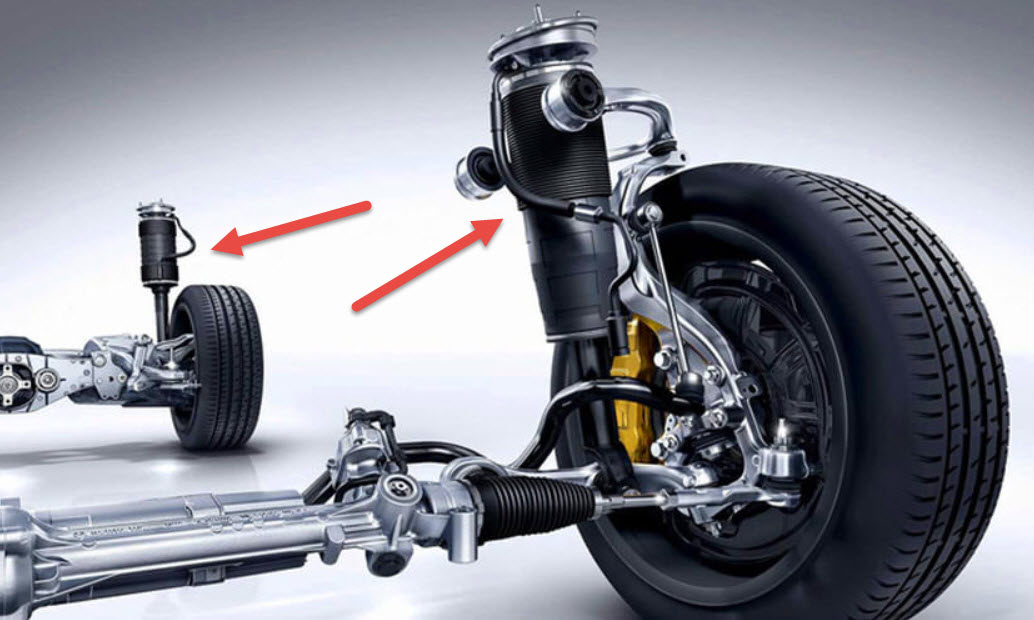
Lub complex muaj xws li cov cuab yeej uas ua kom cov kev cai ntawm damping zog thiab dynamic rigidity, nrog rau txo lub cev yob:
- suspension controller nrog microprocessor, nco thiab I / O circuits;
- active mechanisms rau parrying yob (tswj anti-yob tuav);
- complex ntawm sensors;
- shock absorbers uas tso cai rau hluav taws xob tswj kev nruj.
Lub dashboard tswj, feem ntau qhov no yog ib qho on-board sib tham sib zaub, tus neeg tsav tsheb tuaj yeem teeb tsa ib qho kev ua haujlwm raws li nws nyiam. Predominance ntawm kev nplij siab, sportiness lossis off-txoj kev muaj peev xwm raug tso cai, nrog rau kev hloov kho siab dua ntawm kev ua haujlwm nrog hom kev nco. Cov kev hloov pauv tau tuaj yeem rov qab sai sai rau qhov chaw qub.

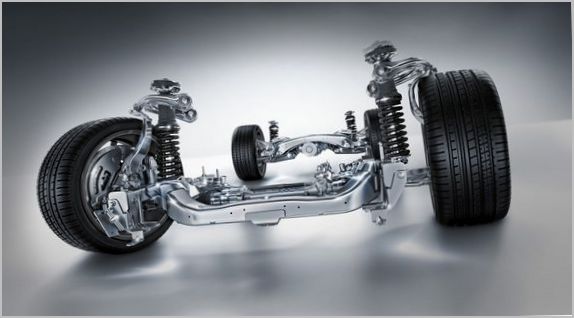
Cov kev xav tau rau transverse stabilizers yeej ib txwm muaj teeb meem. Ntawm ib sab, lawv lub hom phiaj yog los xyuas kom meej lub cev yob tsawg. Tab sis nyob rau hauv no txoj kev ncua kev kawm ntawv acquires tus cwj pwm ntawm dependence, uas txhais tau hais tias kev nplij siab yog txo. Thaum tsav tsheb ntawm txoj kev phem, qhov muaj txiaj ntsig zoo dua yuav muaj kev ywj pheej ntau dua ntawm tus kheej lub log kom ua tiav qhov siab tshaj plaws ntawm cov axles. Tsuas yog nyob rau hauv txoj kev no, tag nrho cov kev ncua kev mus txawv tebchaws yuav tsum tau siv tag nrho los xyuas kom meej kev sib cuag ntawm cov log tsheb nrog cov txheej. Lub stabilizer nrog qhov nruj nruj, uas feem ntau yog ib qho yooj yim bar ntawm lub caij nplooj ntoos hlav steel, ua haujlwm ntawm lub hauv paus ntsiab lus ntawm lub torsion bar, yuav tsis muaj peev xwm ua tau zoo sib npaug hauv txhua qhov xwm txheej.
Nyob rau hauv active suspensions, lub stabilizer yog sib cais, muaj peev xwm ntawm hluav taws xob tswj. Cov hauv paus ntsiab lus sib txawv tuaj yeem siv los tswj qhov txo qis. Qee lub tuam txhab siv lub tshuab ua ntej rau kev sib tw los ntawm lub tshuab hluav taws xob nrog lub gearbox, lwm tus siv txoj kev hydraulic, txhim kho hydraulic cylinders ntawm lub stabilizer lossis nws txuas rau lub cev. Nws kuj tseem ua tau kom ua raws li cov stabilizer bar nrog tus kheej hydraulic kheej kheej ua haujlwm nyob rau hauv parallel nrog cov ntsiab lus elastic.
Kho lub poob siab
Ib tug pa shock absorber muaj cov cuab yeej ntawm kev hloov nws dynamic rigidity nyob ntawm seb qhov ceev thiab acceleration ntawm tus pas nrig zog. Qhov no yog ua tiav los ntawm qhov system ntawm throttling li qub los ntawm cov kua dej ntws tawm.
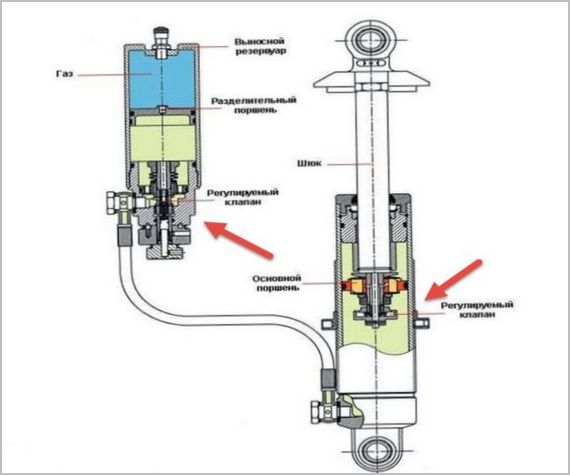
Rau kev khiav hauj lwm tswj ntawm bypass throttles, ob txoj kev yog ua tau - txhim kho spool-hom electromagnetic li qub los yog hloov cov khoom ntawm cov kua nyob rau hauv ib tug magnetic teb. Cov neeg tsim khoom siv ob txoj hauv kev, qhov thib ob tsawg dua, vim nws yuav xav tau cov kua dej tshwj xeeb uas hloov nws cov viscosity hauv qhov chaw sib nqus.
Lub luag haujlwm tseem ceeb sib txawv ntawm kev hloov pauv hloov pauv
Active suspensions nrog cov cuab yeej ntawm adaptation muab lub peev xwm los programmatically tswj cov neeg siv khoom zoo ntawm lub tsheb ntawm txhua txoj kev:
- lub cev ib txwm tuav ib txoj hauj lwm muab txheeb ze rau txoj kev, deviations los ntawm kev txiav txim tsuas yog los ntawm kev ceev ntawm lub adaptation system;
- lub log muaj qhov siab tshaj plaws ua tiav qhov kev sib cuag nrog cov txheej;
- theem ntawm acceleration nyob rau hauv lub cabin los ntawm tej pob yog ntau qis dua nrog ib txwm ncua kev kawm ntawv, uas ua rau kom kev nplij siab ntawm kev mus los;
- lub tsheb tswj tau zoo dua thiab ruaj khov dua ntawm kev kub ceev;
- cov tshuab siab tshaj plaws tuaj yeem cia siab tias yuav ua pob los ntawm kev txheeb xyuas txoj kev ua ntej ntawm lub log thiab kho cov dampers ua ntej.
Qhov tsis zoo, zoo li tag nrho cov txheej txheem nyuaj, yog ib qho - kev nyuaj siab thiab cov kev ntseeg tau zoo thiab cov nqi ntsuas. Yog li ntawd, adaptive suspensions yog siv nyob rau hauv cov nqi them los yog raws li cov khoom xaiv.
Algorithms ntawm kev ua hauj lwm thiab ib txheej ntawm cov cuab yeej yog tas li ua complex thiab txhim kho. Lub hom phiaj tseem ceeb ntawm kev txhim kho nyob rau hauv lub tshav pob ntawm active adaptive ncua kev kawm ntawv yog ua kom tiav qhov siab tshaj plaws so ntawm lub tsheb lub cev, tsis muaj teeb meem dab tsi tshwm sim rau lub log thiab lawv txuam unsprung masses. Nyob rau hauv rooj plaub no, tag nrho plaub lub log yuav tsum tsis tu ncua kev sib cuag nrog txoj kev, ua kom lub tsheb ntawm ib tug muab trajectory.